
Der Stoff, aus dem Science-Fiction-Filme sind: Seit Jahrzehnten inspiriert sogenannte „programmierbare Materie“ Filmemacher*innen und Kinobegeisterte weltweit. Sie ist in der Lage, ihre Gestalt und Eigenschaften wie z. B. Farbe, Form und Elastizität entweder eigenständig oder basierend auf äußeren Einflüssen zu verändern. Als Gegenstand der Forschung ist programmierbare Materie auch für Wissenschaftler*innen von Interesse. Bisherige Ansätze weisen allerdings eine Reihe von Unzulänglichkeiten auf. Wissenschaftler*innen der Universität Paderborn arbeiten deshalb daran, die zugrundeliegenden Modelle und Algorithmen zu verbessern, die die futuristischen Formwandler möglich machen sollen. Das Forschungsprojekt CIRPROM („Algorithmische Grundlagen für schaltkreisbasierte programmierbare Materie“), geleitet von Prof. Dr. Scheideler, wird bis 2027 von der Deutschen Forschungsgemeinschaft (DFG) mit rund 350.000 Euro gefördert.
„In Filmen gibt es Lebewesen, Roboter und sonstige Konstrukte, die ihre Form und ihr Aussehen flexibel anpassen können. Technologisch sind wir aber noch weit davon entfernt, programmierbare Materie mit solchen Eigenschaften zu realisieren“, erklärt Scheideler, Informatiker an der Universität Paderborn. „Um herauszufinden, welche Technologie am vielversprechendsten ist, müssen zunächst geeignete Modelle entworfen und auf ihre Fähigkeiten bezüglich der wichtigsten Anwendungen für programmierbare Materie untersucht werden. Hier hat sich zwar in den letzten Jahren viel getan, allerdings sind die bisherigen Ansätze entweder nicht universell einsetzbar oder einfach viel zu langsam, was die Formwandlung angeht“, so der Wissenschaftler weiter.
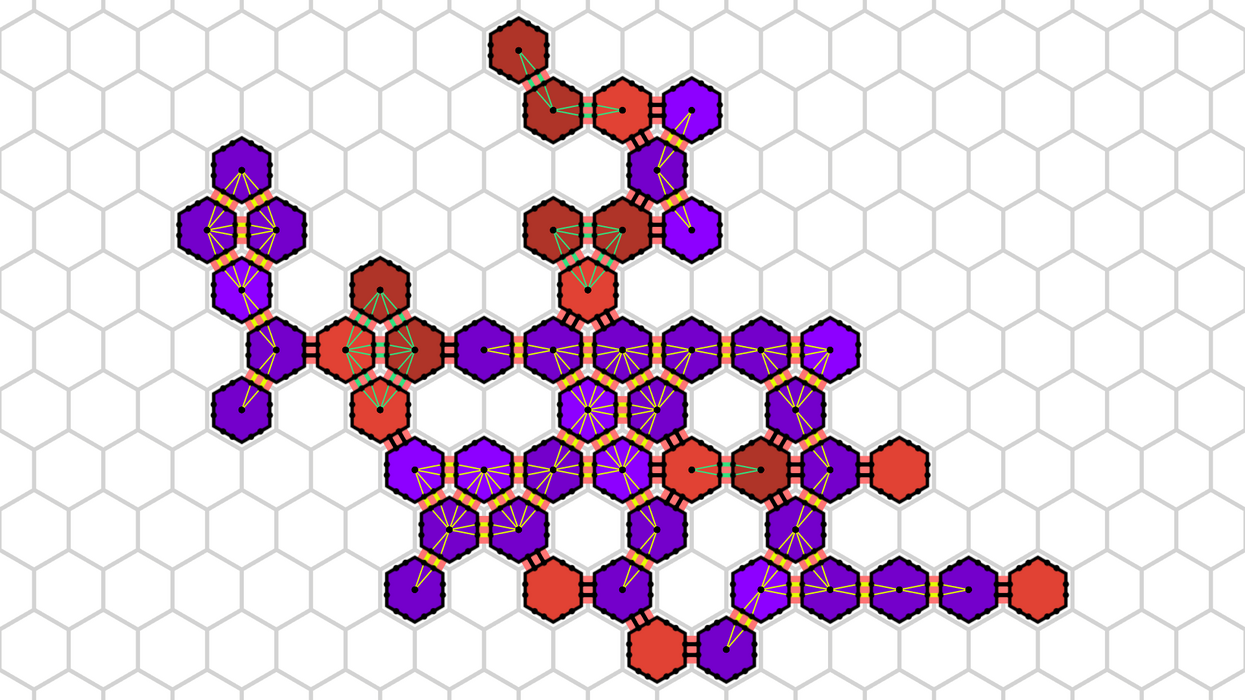
„Unsere Vision der programmierbaren Materie baut auf dem sogenannten ‚Amoebot-Modell‘ auf, das wir vor rund zehn Jahren vorgeschlagen und seitdem ständig weiterentwickelt haben. Als Vorbild haben wir Amöben genommen“, sagt Scheideler. Das sind primitive Einzeller, die sich mittels Expansionen und Kontraktionen fortbewegen. Das Team um den Informatiker modelliert die Amoebots als einfache Roboter auf Mikro- oder Nano-Ebene, die sich mit anderen Amoebots verbinden und mit diesen interagieren können. Dadurch können sie komplexe Formen bilden. Scheideler: „Durch kürzliche Erweiterungen des Modells sind die Roboter nun in der Lage, innerhalb dieser Formen Strukturen aufzubauen, die an die Funktionsweise von Nervenbahnen und Muskeln erinnern. So können Informationen ausgetauscht und Bewegungen synchronisiert werden, was dazu führt, dass rapide Formwandlungen und -heilungen jetzt prinzipiell möglich sind.“
Zwar haben die Wissenschaftler*innen bereits eine Reihe von Problemen gelöst, Hürden gibt es aber weiterhin: „Die schnelle Bestimmung eines Amoebots, der die Koordination der anderen Amoebots übernimmt, und die rapide Kompassanpassung, damit sich die Bots im Klaren darüber sind, in welche Richtung eine synchronisierte Bewegung zu erfolgen hat, sind bereits möglich. Große Herausforderungen sind aber nach wie vor, wie durch eine gezielte Abfolge von Bewegungsvorgängen eine Zielform am schnellsten erreicht werden kann, wie beschädigte Formen möglichst schnell erkannt und repariert werden können und wie Energie am effektivsten dorthin geleitet werden kann, wo sie für die Formtransformationen benötigt wird. Solche Algorithmen sind für eine spätere technische Umsetzung essenziell“, so Scheideler weiter.
Zusätzlich zur Formwandlung könnten die Bots auch zur Heilung innerer Verletzungen im medizinischen Bereich oder bei der strukturellen Überwachung und Reparatur von Maschinen und Gebäuden zum Einsatz kommen: „Die Anwendungsmöglichkeiten sind riesig. Das Thema ist für die Industrie, die Medizin und die Gesellschaft im Allgemeinen von großer Bedeutung“, hält Scheideler fest. Bis die Bots aber tatsächlich einsatzbereit sind, wird es wohl noch einige Jahrzehnte dauern.
Der Wissenschaftler, der am Institut für Informatik in Paderborn das Fachgebiet „Theorie verteilter Systeme“ leitet, beschäftigt sich in seiner Forschung schon seit vielen Jahren mit der Entwicklung von Modellen, Methoden und Architekturen für verteilte Systeme, wie es das Amoebot-Modell ist. Neben der klassischen Entwicklung verteilter Algorithmen und Datenstrukturen geht es dabei auch um Methoden selbststabilisierender und -optimierender Systeme.



{kind=link}
{kind=link}